Quoi de neuf 2014
From Eric
Février 2013
- 4/2/2013
- A force de lire des bouquins sur les asservissements, je me suis dit qu'il ne serait pas idiot d'en "fabriquer" un. Je me suis donc lancé dans la réalisation d'un régulateur de vitesse de moteur à courant continu. C'est l'exercice de base pour tout automaticien car (i) le matériel pour le réaliser est facile à obtenir, (ii) le modèle mathématique (fonction de transfert) est relativement simple.
- Pour l'instant, je me suis contenté d'une approche empirique ; je traiterai "proprement" le problème plus tard...
- Le système comporte un moteur à courant continu à balais (moteur de lecteur de CD) sur l'axe duquel j'ai collé un minuscule aimant au néodyme. La vitesse du moteur est obtenue au moyen d'un capteur à effet hall : lorsque l'aimant passe devant le capteur, un condensateur est déchargé ; il se recharge pendant que le rotor fait un tour. Vue la vitesse de rotation, l'exponentielle de chargement du condensateur est "très proche"" d'un segment de droite. Le signal en dent de scie est "recopié" au moyen d'un ampli-op monté en suiveur puis filtré à l'aide d'un filtre passe-bas discret. J'obtiens ainsi un signal dont la valeur reflète la vitesse de rotation (proche de VCC pour les petites vitesses lente car le condensateur est chargé pratiquement tout le temps et tendant vers 0 lorsque la vitesse augmente).
- Le signal d'erreur (différence entre la vitesse de rotation et la consigne de vitesse) est calculé par un ampli-op monté en soustracteur.
- Le signal d'erreur est amplifié (ampli-op monté en ampli inverseur); on y rajoute alors une tension d'offset (voir plus loin...) et on inverse le tout pour obtenir le signal de commande.
- Le signal de commande est passé en entrée d'un montage darlington comprenant un transistor petits signaux et un transistor de puissance.
- Voila ce à quoi ressemble le montage (;-)) :

- On trouvera plus de détails dans la rubrique "Asservissement d'un moteur en vitesse".
Janvier 2013
- 13/1/2013
- Reprise de la "barrière infrarouge" à NE567 expérimentée l'année dernière : Je vais rajouter un multiplexeur analogique pour pouvoir traiter plusieurs capteurs (utilisant un CD4051) et peut-être un PIC pour en faire un dispositif de détection autonome.
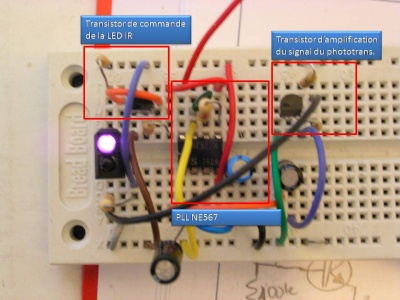

- Reprise de la "barrière infrarouge" à NE567 expérimentée l'année dernière :
- 4/1/2013
- Je me suis amusé à installer un interpréteur basic sur ma carte à NXP1768 (arm). L'interpréteur s'appelle Jumentum. Cet interpréteur est accessible via Ethernet ou via une ligne série. Sur Ethernet, il est possible d'utiliser telnet ou un browser web. Jumentum propose un éditeur intégré assez puissant (plein écran). On trouvera quelques détails sur cette manip dans la rubrique intitulée "Interpréteurs sur microcontroleurs".
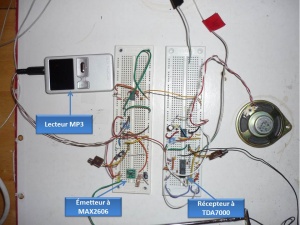
- J'ai réalisé une toute petite expérimentation du chip MAX2606. Ce chip intègre dans un tout petit boitier SOT23-6 un oscillateur avec sa varicap. Il permet (notamment) de réaliser un adaptateur sortie audio -> FM. C'est ce que j'ai fait. On trouvera le détail dans la rubrique "Emetteurs radio". En attendant, voila une petite photo du montage comportant l'émetteur à MAX2606 et le récepteur à TDA7000 :


Les années précédentes :