Quoi de neuf 2018
From Eric
Experiments carried out in the past (from 2011) are described hereafter:
Contents |
June 2018
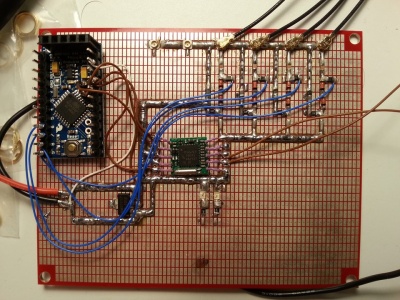
- I have built a small logic analyzer based on a BeagleBone Black. Well, the hardware and software of the BeagleLogic have been designed by Kumer Abhishek (he is currently designing a standalone version of the BeagleLogic). This logic analyzer uses the two real-time processors (PRU) of the BeagleBone's Sitara SoC to ensure a precise sampling.
- My only effort was to order the PCB to jlcpcb (very cheap) and to solder the tiny 74LVCH16T245 used as a level adapter (to be able to sample 5V signals)... I have had some problems with solder bridges on the first board, so I used a thinner needle (23GA) to put the solder paste on the second board.
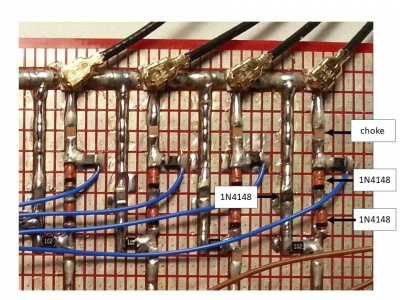
- Here are pictures of the thing: and a close view of the adapter cape:



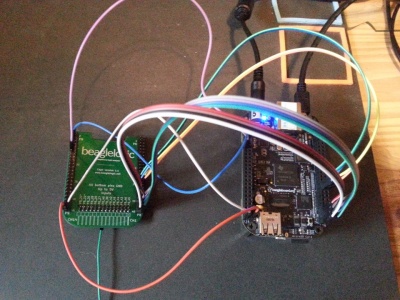
- Well, note that since I have soldered the connectors on the wrong side of the board (yes, I have...), I had to use a bunch of Dupont cables to connect the "cape" to the board. I have ordered a new 74LVCH16T245 to make another, correct, version of the board.
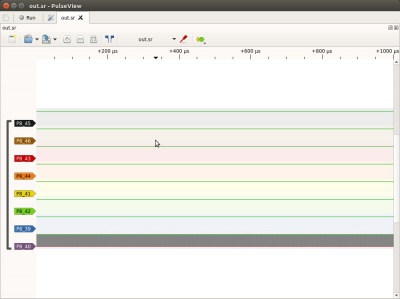
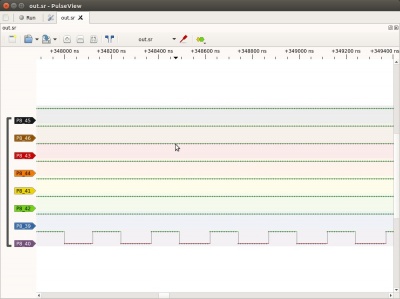
- The data sampled by the BeagleLogic can be displayed using Sigrok's PulseVision:
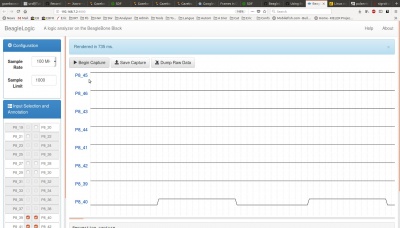
- The sampling itself can be done using the CLI version of Sigrok running on the BeagleBone. Kumer has also developed a simple Web interface:
- Some details about the BeagleLogic board are given on a specific page.






- Playing with my small robot arm.
- I have modeled it using FreeCAD (see model and actual system below; the gripping arm is still to be modeled).
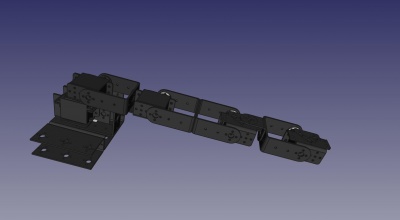 The objective is to drive it using inverse kinematics. To do that, I need to calculate all the distances between axes, which will be easy from the 3D model. Furthermore, this 3D model will be useful to create a simulated dynalic model of the arm using, for instance, Gazebo or ROS. Now, I am strugling with the URDF file. More to come...
The objective is to drive it using inverse kinematics. To do that, I need to calculate all the distances between axes, which will be easy from the 3D model. Furthermore, this 3D model will be useful to create a simulated dynalic model of the arm using, for instance, Gazebo or ROS. Now, I am strugling with the URDF file. More to come...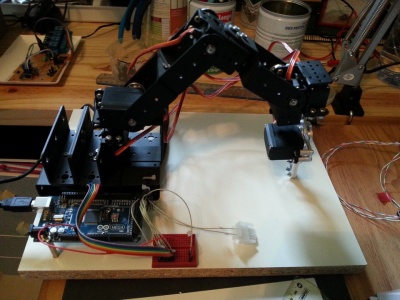
- I have modeled it using FreeCAD (see model and actual system below; the gripping arm is still to be modeled).


May 2018
- Un bonjour amical à François et Jacky. Mon dieu (enfin, celui des autres), le temps passe...
- I have received my Dragino LoRa gateway. (See my notes.) Now I am able to send data from an Arduino (equiped with a Semtech LoRa transceiver) to a MTQQ broker (ThingsSpeak). Now, I have to build one or two measurement devices (to measure what?...). The challenge is to keep the energy demand as low as possible so that batteries do not need to be refilled too often. On possibility is to use a standard Arduino which spend most of its time in deep sleep and is awaken every 15 ou so seconds by a RTC. ANother solution could be tu use a very low energy msp430. To be continued...

- I have tried the Gogle Assistant SDK (tutorial here). My objective is to be able to switch lights on / off using Googl's vocal interface. Not very useful actually...
- (Still) playing with my Zturn Zynq board. I have managed to install Petalinux (on core 0) aside FreeRTOS (on core 1). See notes.

April 2018
- Experiment Micropython on ESP32. See notes.
- Playing with my Zturn Zynq board. See notes. .

- Experiment the Ti MSP340 Chronos watch.

March 2018
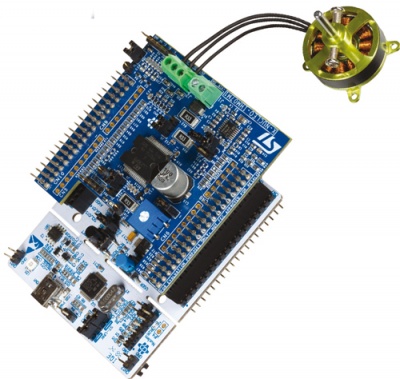
- First experiments with the STM32 Nucleo (NUCLEO-F302R8) and motor control extension board (X-NUCLEO-IHM07M1), the STM32 Nucleo pack FOC and 6-step motor control: I am still fighting with the motor SDK... I am writing a note that will eventually explain in a how to setup the environment in a unique document ...

February 2018
- Built a safety case for my son, using a fingerprint sensor. Here are a few pictures:

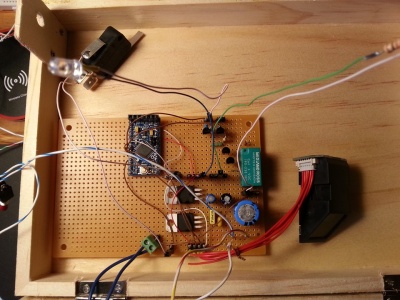 The code is here.
The code is here.



January 2018
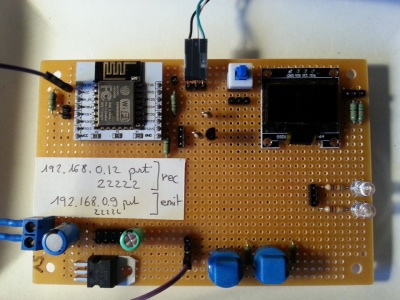
- Playing with the ESP8266 using the Espressif SDK. (Search for ESP8266 for other experiments using NodeMCU). I am using the PlatformIO environment. I am now able to print a message on the tiny screen from my laptop, through internet:
- Trying to build a doppler-based "fox hunter" (on-going). See notes here