Quoi de neuf 2019
From Eric
Experiments carried out in the past (from 2011) are described hereafter:
Contents |
From April 2019 to March 2020
- I've done a few things not yet reported here. Basically, I worked on a new robot based on ROS. Some documentation is available here.
- I have build a device to display messages on a large LED display. It is connected to the internet and message can be send using a mobile phone. When a mesage is received it play a very fancy music (here.).
April 2019
- Continuing playing with ROS. I have written a note about the model of my robot and the problems that I have encountered. The model is composed of a very simple chassis, and a LIDAR and an arm fitted on top of the robot. I have managed to control the robot using Python.
- Here are two pictures of the Gazebo simulation:
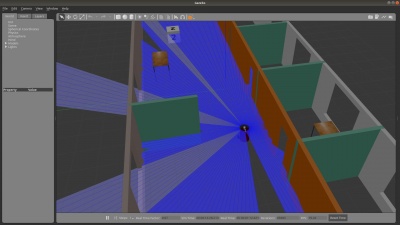

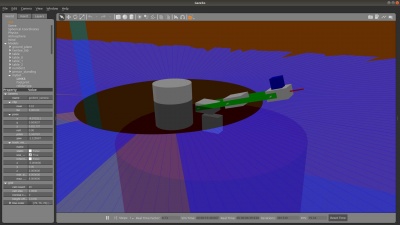
- The second picture is a close up view of the robot's arm (front) and the LIDAR (back). The blue layer represents the LIDAR ray. Note that the minimal distance the LIDAR can capture is 20cm, hence the dark disk centered on the LIDAR. Some stupid videos can be found here and there. The first video shows simultaneously the robot and the image capture by the camera fitted at the end of the arm. The second video shows movements of the arm. The green ball moving at the end of the "fnger" is computed by means of a Python program and some geometrical transformation. It shows how to compute the absolute position of the end of the robots "finger" using (i) odometry data and (ii) transformation (TF) published by the simulator.
- I have spent a lot of time watching videos and tutorials about IA. I recommend the lectures (and the book) from Shai Ben-David (here).


March 2019
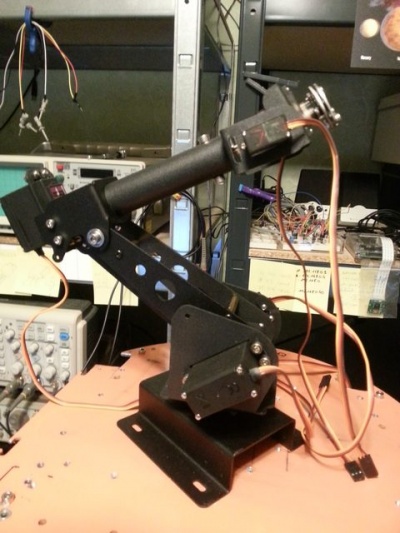
- Played with my robotic arm and ROS. I have modeled the robotic arm using URDF, and displayed it with Gazebo. Now I can drive each axis of the robot arm using RViz and mimic the movement of the actual arm. Here is a picture of it:
- Entering the realm of Quantum Computing... Reading various tutorials... My advice: it is easier to enter the domain of QC using algebra (i.e., maths) rather than trying to find analogies, or using intuition.
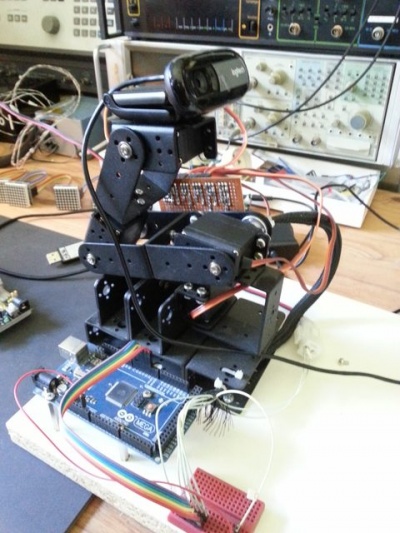
- I have bought another small robotic arm. Here is a picture: No documentation at all was provided with the unassembled robot. I have had some difficulties to assemble it but finally managed to do it (more or less...). I had to change the two servomotors located at the base of the main link, because they were not strong enough.


February 2019
- Nothing.
January 2019
- Nothing